Annexe A : vitesse de la lumière et formule de Louis de Broglie
Un expérimentateur S étudie, dans une région de l’éther où le champ gravitationnel est uniforme, l’onde broglienne H émise par une particule U qui est une ultraparticule ou un quanta. En réalité, d’après l’hypothèse H8, S observe la trace de H sur l’espace à 3 dimensions E défini par le repère galiléen R qu’il a choisi pour effectuer ses mesures. Soit Rabs = (O, I, J, K, L) un repère orthonormé fixe par rapport au noyau de l’éther et dont le vecteur L est parallèle aux méridiens (localement rectilignes et parallèles) et dirigé dans le sens des temps propres croissants. Soit V le vecteur directeur de U et na la fréquence de son onde broglienne H ; celle-ci étant périodique, plane et normale à V , sa phase j, en un point M de coordonnées (X, Y, Z, S ) et à la date absolue s, est de la forme :
(1) j = 2(pi)na [ s - (dX + eY + fZ + gS)/cM ]
où cM est la vitesse de propagation (constante) de l’onde broglienne et (d, e, f, g) les coordonnées du vecteur unitaire u tel que V = cM. u.
Soit W le vecteur-vitesse de l’origine A du repère galiléen R choisi par S et a sa dérive. On peut choisir le repère Rabs de façon que O soit la position de A à l’instant origine du temps absolu s et que les coordonnées de W soient
(cMsin a, 0, 0, cMcos a), et l’on vérifie qu’on peut prendre pour base de R les vecteurs i, j, k de coordonnées respectives :
(cos a, 0, 0, -sin a), (0, 1, 0, 0), (0, 0, 1, 0).
On va démontrer que la trace de H sur E observée par S est une onde périodique : il faut donc vérifier que la phase j de H, en un point M de E de coordonnées (x, y, z) dans R et de temps propre t, est de la forme :
(2) j = 2(pi) [ (t/T) - (d’x + e’y + f’z)/l ]
où T est la période de l’onde, l sa longueur d’onde et (d’, e’, f’) des constantes telles que d’² + e’² + f’² = 1.
a) Etablissons d’abord, pour un point M de E, les relations entre ses coordonnées (x, y, z) dans R, son temps propre t, et ses coordonnées (X, Y, Z, S) dans Rabs à l’instant absolu s. Par définition des temps propres ct = S + ctO, où tO est le temps propre de O. Par un changement d’origine des temps propres, on peut écrire ct = S et de la relation vectorielle :
OM = OA + AM = sW + xi + yj + zk
on déduit les relations :
X = scM sin a + x cos a
Y = y
Z = z
S = ct = scM cos a - x sin a
d’où :
(3) x = X cos a - ct sin a
(4) scM = X sin a + ct cos a
et
X = (x + ct.sin a)/cos a
scM = (ct + x sin a)/cos a
b) En reportant ces valeurs de (X, Y, Z, S) dans (1) on obtient la relation (2) en posant
(5) 1/T = (cna/cM).[(D/cos a) – g] ( D = 1 – d sin a)
d’/l = [na (d - sin a)]/(cM cos a)
e’/l = (na e)/cM
f’/l = (na f)/cM
et la condition d’² + e’² + f’² = 1 s’écrit
(6) 1/l² = (na².H)/(cM².cos²a)
où H = (d - sin a)² + (e² + f²) cos²a. Comme d² + e² + f² + g² = 1, un calcul élémentaire montre que
(7) H = D² - g².cos²a
A) Cas où U est un quanta : g = 0 donc H = D² et les formules (5) et (6) montrent que l et T sont des constantes telles que l = cT. L’expérimentateur S observe donc une onde périodique qui se propage à la vitesse constante de c m/s. C’est en particulier le cas des ondes lumineuses qui sont les traces sur E des ondes brogliennes des quanta particuliers que sont les photons.
B) Cas où U est une upm ou une upam : g > 0. D’après H8 et ses conséquences, l’expérimentateur S localise U au point M de E qui est situé sur le méridien de U et il attribue à U les caractéristiques de M dans R : coordonnées (x, y, z), temps propre t, vitesse v, masse m, masse au repos m0. On peut supposer que U est en O à l’instant s = 0 et comme le vecteur directeur V de U est aussi son vecteur vitesse, les coordonnées de U à l’instant t sont donc :
X = d.cM.s Y = e.cM.ts Z = f.cM.s S = g.cM.s
Comme U et M sont situés sur un même méridien, les coordonnées X, Y, Z de U sont aussi celles de M dans Rabs. D’après la relation (4) :
X = d.cM.s = d.(Xsin a + ct cos a )
d’où
X = (d ct cos a)/D et cM.s = (ct cos a) /D
On en déduit
y = Y = ct.(e.cos a)/D
z = Z = ct.(f.cos a)/D
et, d’après (3) : x = ct.(d - sin a)/D
Par suite v² = (dx/dt)² + (dy/dt)² + (dz/dt)² = c²H/D²
et, en remplaçant H par D²v²/c² dans (6), on obtient l = (c.cM cos a)/(na.D.v)
Comme 1- v²/c² = 1 – H/D² = g².cos²a/D², on en déduit
v<c
(8) mO/m = (g cos a)/D
et l = (c.cM mO)/(m.v.g.na)
Comme g = cos teta (teta = dérive de U), les relations de la page 12 :
nacM cos teta = cn0 ; n0 = m0c²/h ; m0 = m0/k² ; k = cM/c
montrent que
(9) (c.cM mO)/(g.na) = h
D’où la relation de Louis de Broglie : l = h/mv
Annexe B - L'algèbre de Clifford C16
Je veux simplement décrire ici les raisonnements qui m’ont conduit à émettre l’hypothèse de la réalité physique d’un univers à 5 dimensions.
Les quaternions peuvent être définis comme étant les matrices
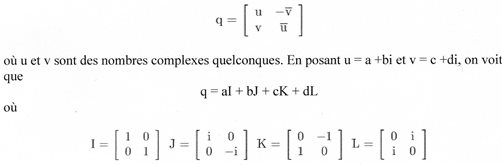
On vérifie que
J² = K² = L² = -I
JL = -LJ = K
LK = -KL = J
KJ = -JK = L
et l'on en déduit que les quaternions forment un corps non commutatif dont I est le neutre de la multiplication. On définit la norme || q || d'un quaternion q en posant :
|| q || ² = a² + b² + c² + d²
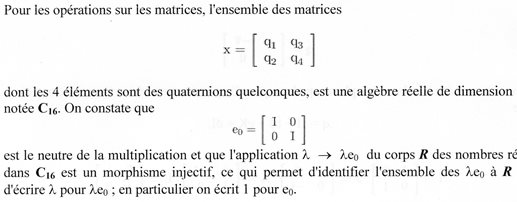
On définit la norme d'un élément x de C16 par :
|| x ||² = [|| q1 ||² + || q2 ||² + || q3 ||² + || q4 ||²]/2
ce qui confère à C16 une structure d'espace vectoriel euclidien. Le coefficient 1/2 a été introduit pour que la norme de e0 soit égale à 1.
Eléments réels de C16 – Pour qu'un nombre complexe z = a + bi soit réel, il faut et il suffit que |z|² = z².Il est donc naturel de définir les éléments réels de C16 comme étant les éléments x tels que || x ||² = x² . J’ai démontré que l'ensemble des éléments réels de C16 est la réunion de R et d'un sous-espace vectoriel E à 5 dimensions et c’est ce résultat qui m’a conduit, à regret, à faire l’hypothèse de la réalité physique d’un temps absolu et d’un univers à 5 dimensions représentés mathématiquement par R et par E.
Les 5 éléments suivants :
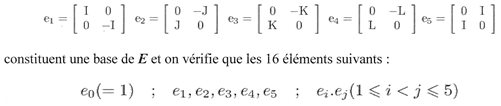
forment une base orthonormée de C16. En désignant par B le sous-espace vectoriel engendré par les 10 éléments ei.ej , on voit que C16 est la somme directe des sous-espaces R, E et B. (scalaires, vecteurs, bivecteurs).
______________________